






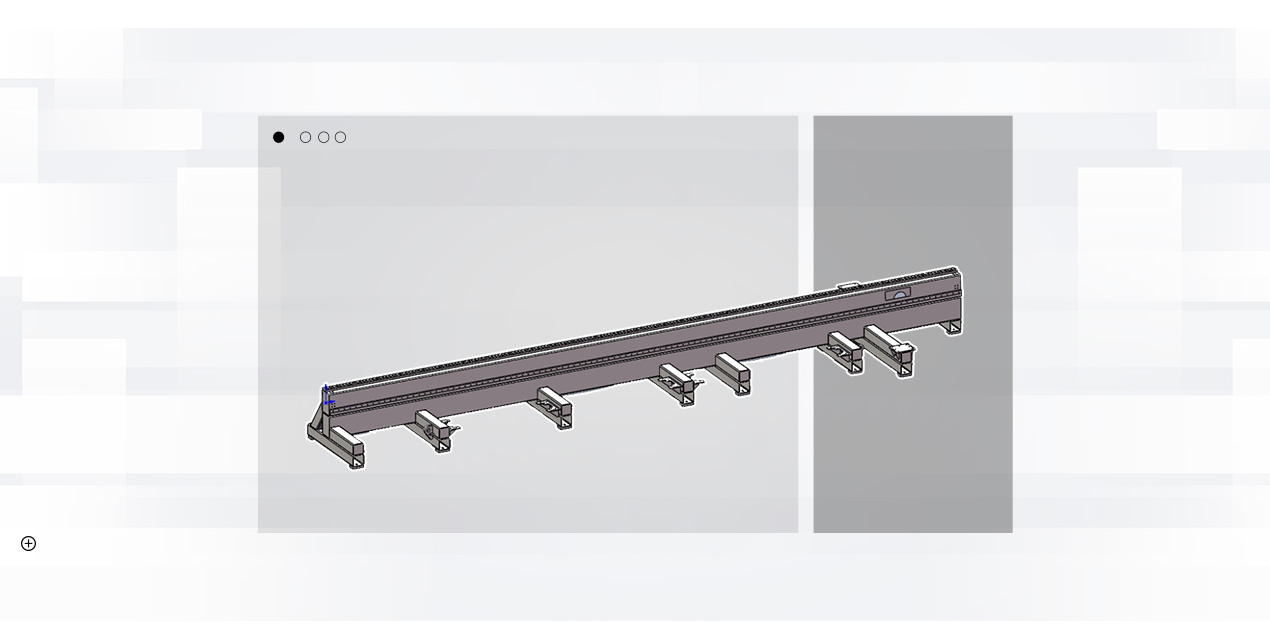
Sidehængende struktur i ét stykke svejset seng
Lejet har en sidehængende struktur og et svejset leje i ét stykke, som er udglødet for at eliminere intern spænding. Efter grovbearbejdning udføres vibrationsældning før færdigbearbejdning, hvilket forbedrer maskinens stivhed og stabilitet betydeligt og sikrer maskinens nøjagtighed. AC-servomotordrevet styres af det numeriske styresystem, og spændepatronen udfører en frem- og tilbagegående bevægelse i Y-retningen efter motoren, hvilket realiserer hurtig bevægelse og fremføringsbevægelse. Både Y-aksens tandstang og den lineære styreskinne er lavet af højpræcisionsprodukter, hvilket effektivt garanterer transmissionens nøjagtighed; grænseafbryderne i begge ender af slaget styres, og der er installeret en hård grænseanordning på samme tid, hvilket effektivt sikrer maskinens bevægelsessikkerhed; maskinen er udstyret med en automatisk smøreanordning, der tilsætter smøreolie til lejets bevægelige dele med jævne mellemrum for at sikre, at de bevægelige dele kører i god stand, hvilket kan forbedre levetiden for styreskinner, gear og tandstænger.
Frontfødningsenhed
Den forreste fødeanordning omfatter en støtteplade, der styres af en luftcylinder, og som støtter røret, når det afskårne rør er langt, og forhindrer det i at hænge ned.
Når emnet skæres, støtter den hævede støttecylinder støttepladen for at støtte røret og forhindre det i at hænge. Når emnet skæres, trækkes alle hævede støttecylindre tilbage, og emnet falder ned på blindpladen og glider til opbevaringsstedet. Cylinderens funktion styres automatisk af systemet.
Den forreste sektion er også opdelt i opfølgningstype og manuel justeringstype.


Støttemekanismer
Der er installeret 2 sæt støttemekanismer på sengen, og der er to typer tilgængelige:
1. Følgestøtten styres af en uafhængig servomotor, der bevæger sig op og ned, primært for at udføre følgestøtte ved overdreven deformation af lange, afskårne rør (rør med små diametre). Når den bagerste borepatron bevæger sig til den tilsvarende position, kan hjælpestøtten sænkes for at undgå deformation.
2. Hjulstøtten med variabel diameter løftes og sænkes af cylinderen, og den kan manuelt justeres til forskellige skalapositioner for at understøtte rør i forskellige størrelser.
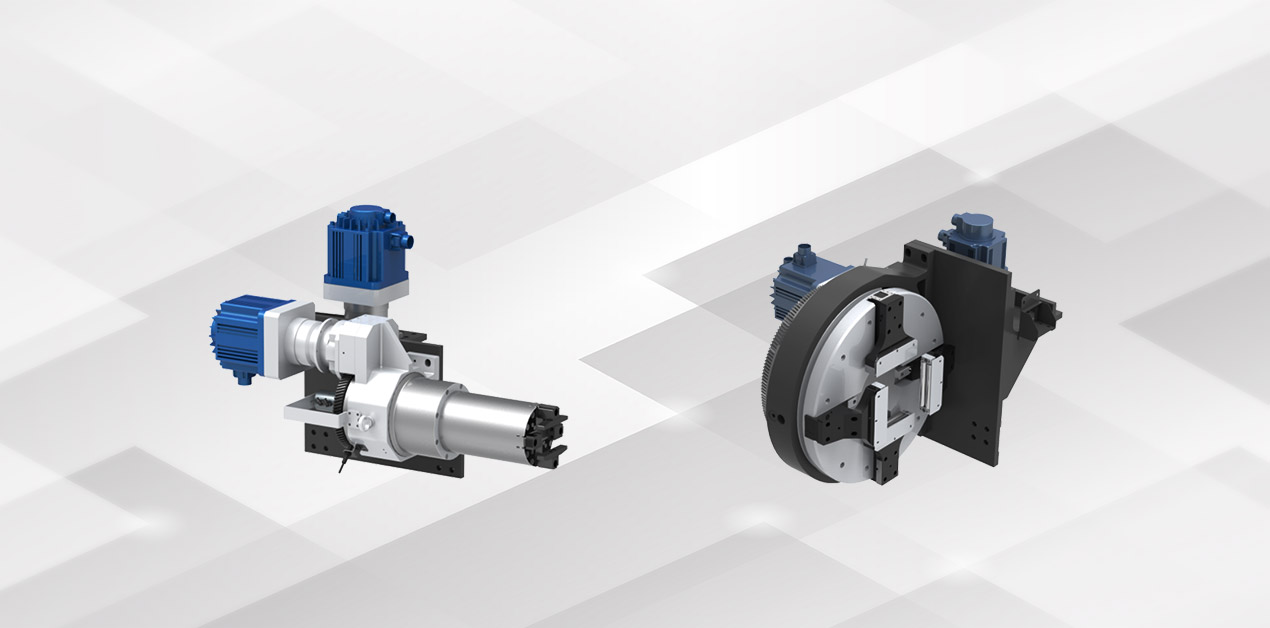
Chuck-del
Spændepatronen er opdelt i to pneumatiske fuldslagsspændepatroner forreste og bageste, som begge kan bevæge sig i Y-retningen. Den bageste spændepatron er ansvarlig for fastspænding og fremføring af røret, og den forreste spændepatron er installeret for enden af sengen til fastspænding af materialer. De forreste og bageste spændepatroner drives henholdsvis af servomotorer for at opnå synkron rotation.
Under fælles fastspænding af dobbeltspændepatroner kan der opnås kort haleskæring, og den korte hale af mundingen kan nå 20-40 mm, samtidig med at den korte haleskæring af længere hale understøttes.
TN-serien af rørskæremaskiner anvender en metode med spændepatronbevægelse og -undgåelse, hvilket kan udføre skæring med to spændepatroner hele tiden, uden at røret bliver for langt og ustabilt, og præcisionen er utilstrækkelig.
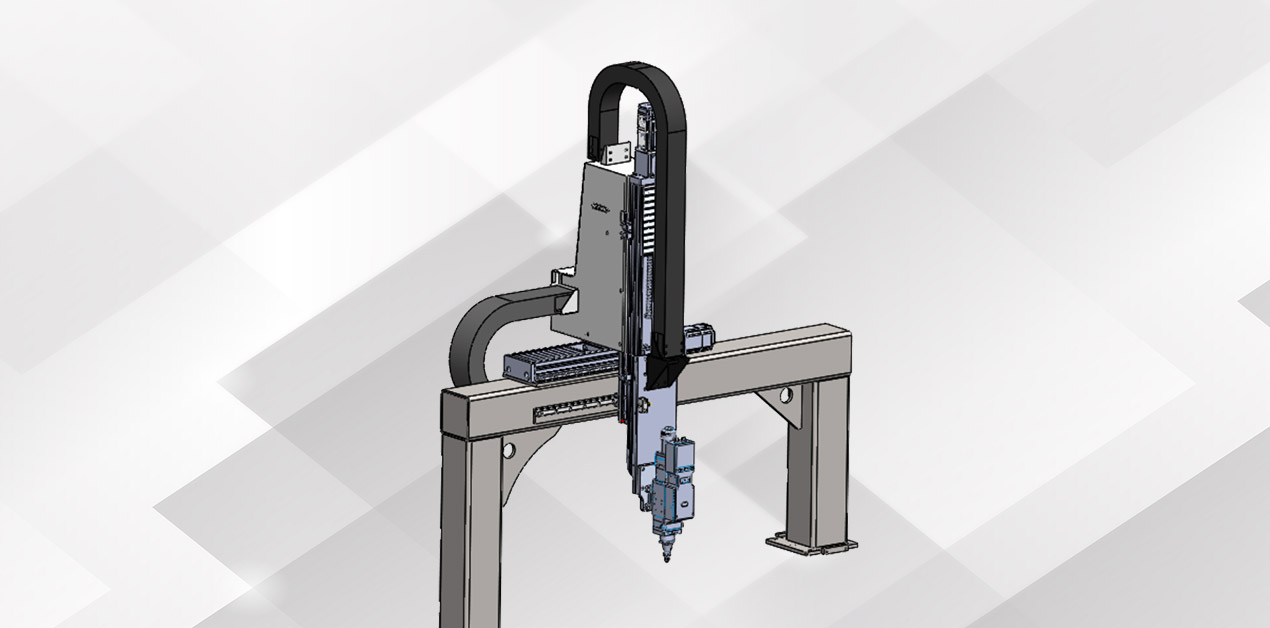
Akse-enhed
Tværbjælken på X-akseenheden anvender en gantry-struktur, som er svejset af en kombination af firkantrør og stålplade. Gantry-komponenten er fastgjort på lejet, og X-aksen drives af en servomotor til at drive tandstangen og tandhjulet for at realisere glidepladens frem- og tilbagegående bevægelse i X-retningen. Under bevægelsesprocessen styrer grænseafbryderen slaget for at begrænse positionen for at sikre systemets sikkerhed.
Samtidig har X/Z-aksen sit eget organdæksel for at beskytte den indre struktur og opnå bedre beskyttelse og støvfjernelseseffekter.
Z-akse-enheden realiserer primært laserhovedets op- og nedadgående bevægelse.
Z-aksen kan bruges som en CNC-akse til at udføre sin egen interpolationsbevægelse, og samtidig kan den forbindes med X- og Y-akserne, og den kan også skiftes til opfølgningskontrol for at imødekomme behovene i forskellige situationer.
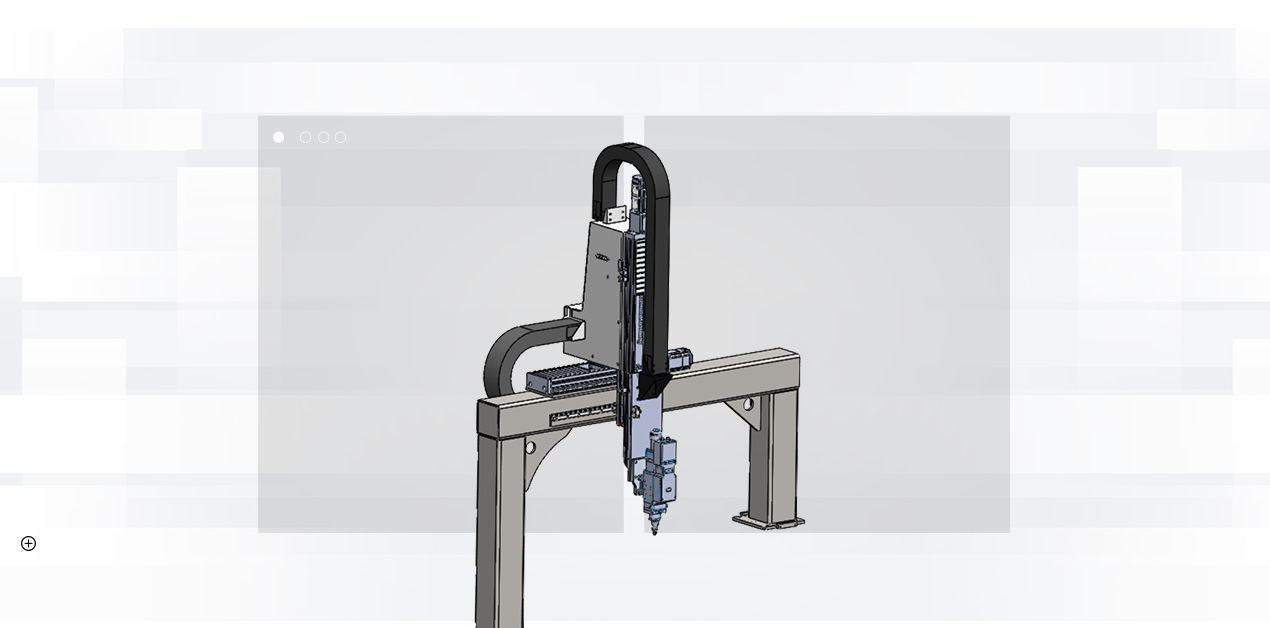
Akse-enhed
Tværbjælken på X-akseenheden anvender en gantry-struktur, som er svejset af en kombination af firkantrør og stålplade. Gantry-komponenten er fastgjort på lejet, og X-aksen drives af en servomotor til at drive tandstangen og tandhjulet for at realisere glidepladens frem- og tilbagegående bevægelse i X-retningen. Under bevægelsesprocessen styrer grænseafbryderen slaget for at begrænse positionen for at sikre systemets sikkerhed.
Samtidig har X/Z-aksen sit eget organdæksel for at beskytte den indre struktur og opnå bedre beskyttelse og støvfjernelseseffekter.
Z-akse-enheden realiserer primært laserhovedets op- og nedadgående bevægelse.
Z-aksen kan bruges som en CNC-akse til at udføre sin egen interpolationsbevægelse, og samtidig kan den forbindes med X- og Y-akserne, og den kan også skiftes til opfølgningskontrol for at imødekomme behovene i forskellige situationer.
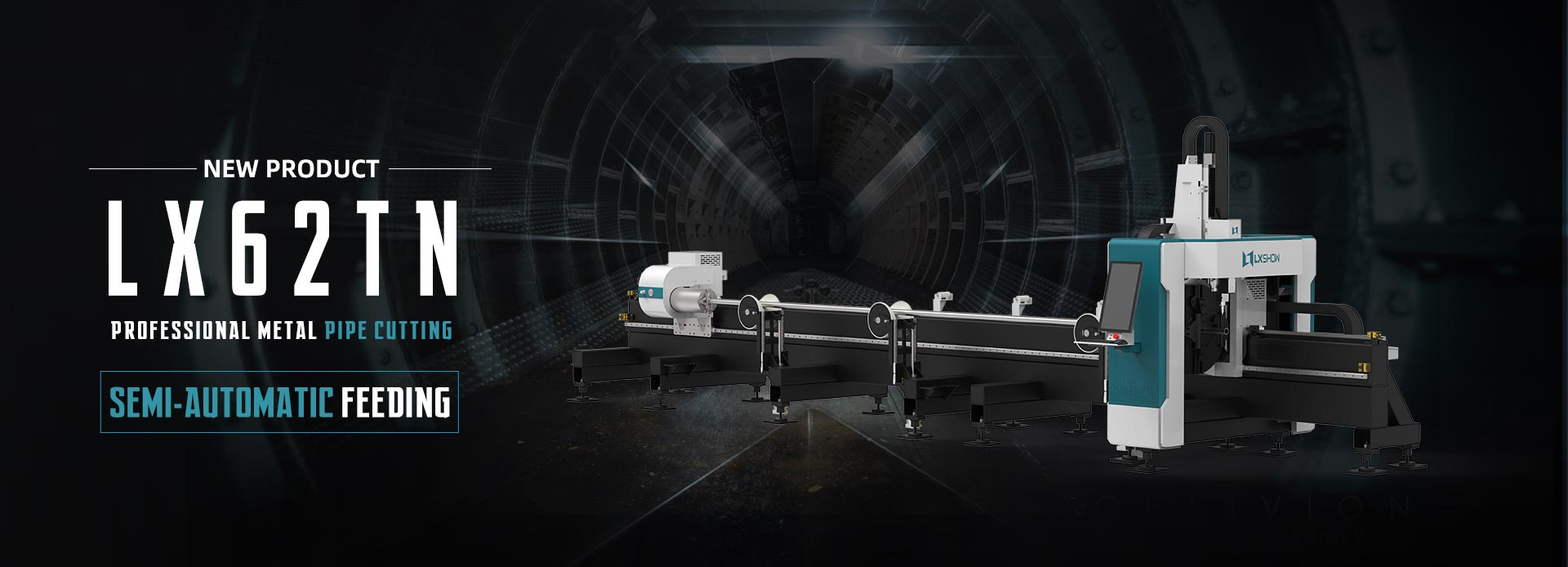
LX62TN Fiberlaserskæremaskine til metalrør, rustfrit stål, kulstofstål
Ansøgningsmaterialer:
Fiberlaser-metalskæremaskine er velegnet til metalskæring som rustfrit stålrør, blødt stålrør, kulstofstålrør, legeret stålrør, fjederstålrør, jernrør, galvaniserede stålrør, aluminiumsrør, kobberrør, messingrør, bronzerør, titanrør, metalrør, metalrør osv.
Anvendelsesindustrier:
Fiberlaserskæremaskiner bruges i vid udstrækning til fremstilling af billboards, reklamer, skilte, metalbogstaver, LED-bogstaver, køkkenudstyr, reklamebogstaver, rørformet metalbearbejdning, metalkomponenter og -dele, jernvarer, chassis, reoler og skabe, metalhåndværk, metalkunstartikler, skæring af elevatorpaneler, hardware, autodele, brillestel, elektroniske dele, navneskilte osv.

-

LX3015E Metalplade Fiberlaserskærer med Exc...
-

LX16030L 4kw 6kw 8kw 12kw 15kw 20kw cnc bedste me...
-

LX2010FC Engros 20% rabat! Bedste fiberlaserskæremaskine...
-

LX4015FC Aluminium Rustfrit Stål Jernplade M...
-
LX6025DH Metalpladelaserskærer til salg Sta...
-
1.jpg)
LXTN62H (A) Fiberlaserrørskæremaskine til ...





1.jpg)





